姓 名:聂卓赟 (副教授)
学历学位:工学博士
所属部门:自动化系
办 公 室:机电信息实验大楼A233
联系方式:yezhuyun2004@sina.com,
18850174267
【研究生招生】:控制科学与工程、电气工程
【本科生科创】:自动控制\机器人\智能系统
【学术经历】
2013--至今 永利平台,自动化系
2012--2013 中国舰船研究设计中心
2006--2012 中南大学,控制科学与工程系,获工学博士学位
2007--2009 新加坡国立大学,联合培养博士
2002--2006 中南大学,获工学学士学位
【科研简介】
主要从事先进控制理论与应用、机器人与智能系统的研究。担任Journal of The Franklin Institute、IEEE /CAA等期刊审稿人。
2010年获教育部首批博士研究生学术新人奖。
2015年获Journal of The Franklin Institute杰出审稿人。
【项目情况】
2015年获得国家自然科学基金,61403149、率相关型迟滞非线性系统的参考补偿与鲁棒跟踪控制研究、23万元、在研、主持
2015年获福建省自然科学基金,2015J01261,面向智能材料及结构的动态迟滞非线性系统多自由度鲁棒控制方法,5万元、在研、主持
2016年中青年教师科技创新资助计划,ZQN-PY408、面向微位移驱动平台的迟滞非线性系统辨识与鲁棒控制研究、40万元、在研、主持
2015年大员工创新创业训练计划项目,省级,一类支持多色打印与折叠便携的全数字3D打印机设计与开发,0.5万元,在研,指导教师
2015年机电学院员工科技创新项目启动基金,校级,基于NFC与Zigbee技术的智能家居控制,结题,指导教师
2016年大员工创新创业训练计划项目,国家级,基于视觉反馈的多自由度机械臂运动规划与跟踪控制,1.0万元,结题,指导教师
【课题介绍】
鲁棒抗扰控制与系统辨识
鲁棒抗扰控制是实现高性能控制的有效途径。我们感兴趣的几类控制方法包括,自抗扰控制(ADRC)、干扰观测器(DOB)、鲁棒自适应控制(RAC),模型预测控制(MPC)、滑模控制(SMC)等。目前,我们正在研究广义干扰观测器(GDOB)、复合型抗扰控制和自适应抗扰控制等方法,期望解决当前控制理论中存在的难点、热点问题,涉及非最小相位系统、时滞系统、分数阶系统和非线性系统等。理论研究的乐趣在于:一个好的idea,有可能形成一整套理论体系。
我们更关注的是理论与应用的结合,即用控制理论解决实际工程问题。应用研究包括:
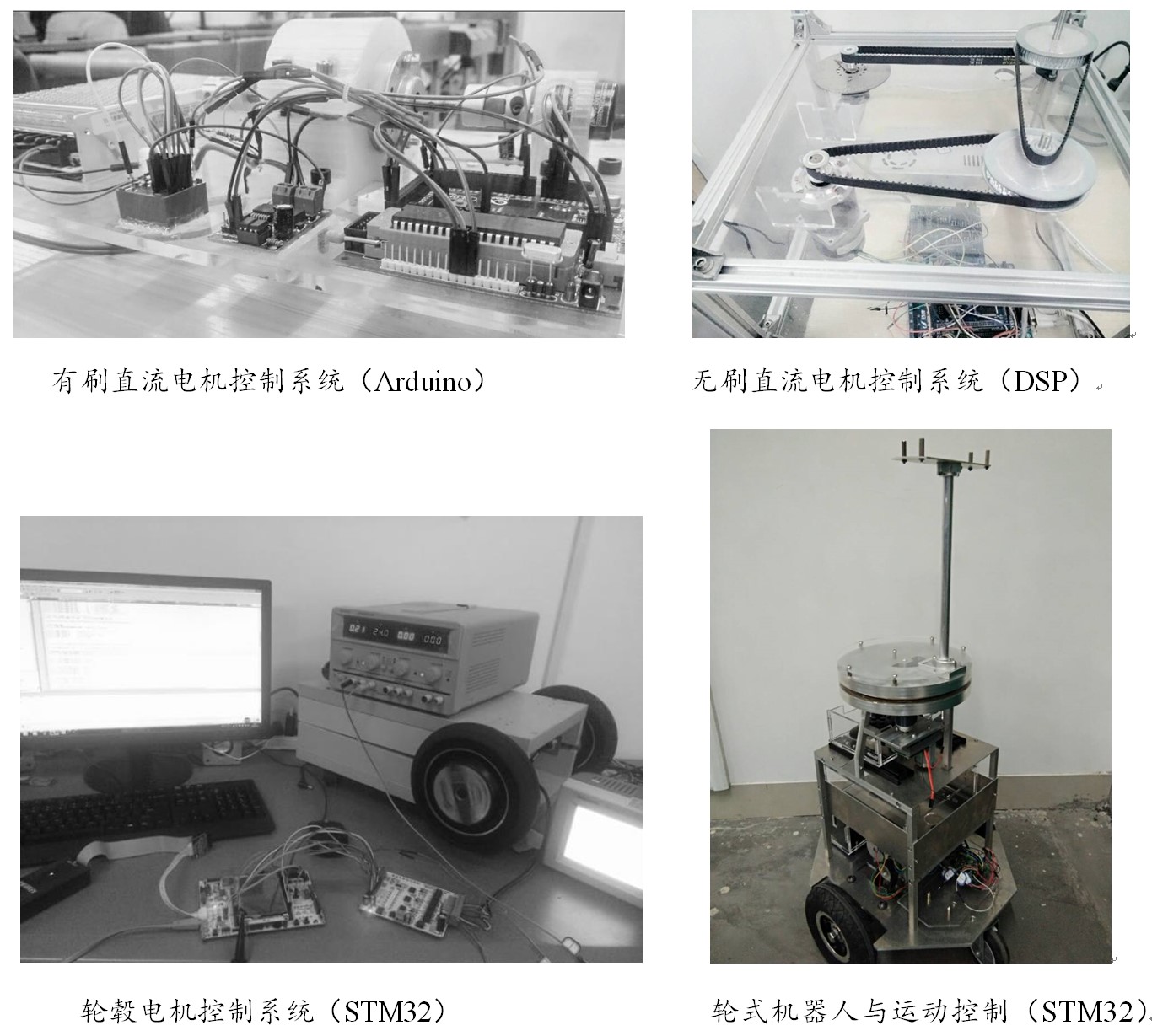
电机控制与轮式机器人
电机是工业系统中最重要的执行装置,我们以直流电机(有刷、无刷、永磁同步、轮毂等)为对象,开展电机驱动(逆变电路)设计、DSP/STM32程序开发、先进控制算法实现、传感器测量技术、C++/labVIEW上位机程序设计和Matlab/Simulink接口等技术研究。
轮式机器人具有无可比拟的灵活性,可以充当各种机器人/电动汽车的底盘。利用Solidworks等三维软件,我们尝试设计轮式机器人机械结构;在电机控制基础上,我们进一步研究轮式机器人的运动规划与控制、多机器人协调控制技术,期望形成一套关于机器人底盘设计、驱动控制、运动规划的完整技术。
视觉自主导航
视觉是机器人最重要的一种外部感知手段,随着人工智能技术发展和硬件成本降低,视觉将是机器人的标配。针对轮式机器人的视觉部分,我们将结合深度学习/卷积神经网络、递归神经网络等人工智能方法,研究单目视觉技术、双目视觉技术、地图构建技术、定位与导航技术。进一步,我们将视觉技术应用于轮式机器人,实现室内自主导航。期望形成一套关于室内机器人的视觉导航解决方案。

金融建模与预测
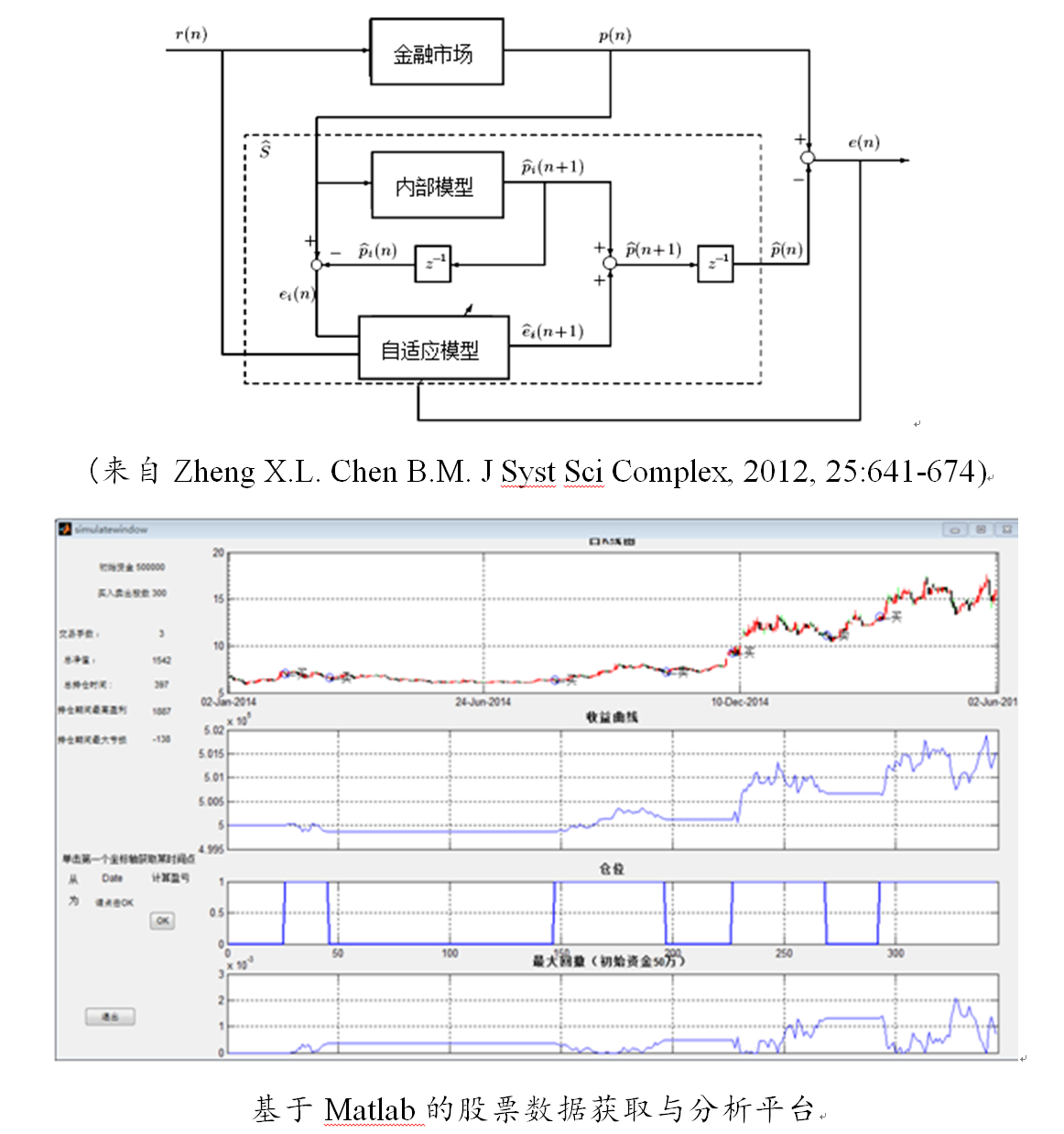
人类社会是发展的、变化的,是难以用常规模型描述的复杂系统。“反馈”是自动控制的活灵魂。在反馈的机制下,针对大量的历史数据,开发模型自适应调整策略和预测机制,能够帮助我们避免复杂的统计分析,更加灵活的认识和理解人类社会的规律。金融,正是在人类的社会活动中产生的一个典型复杂系统。幸运的是,我们能够方便的获取金融系统运行的历史数据,而“反馈”设计也正是我们擅长的。应用“反馈控制”理论去探索客观世界的规律和奥秘是一种乐趣!
在这样的理念下,我们以股市为对象,建立了基于Matlab的股票数据获取与分析平台。我们拟在这个平台下研究时间序列、神经网络等智能化算法,并开发复杂模型的自适应调整算法,实现对股价运行的建模、跟踪和预测。需要指出的是,这一类动态自适应预测建模方法,能够应用于复杂系统的建模与控制,实用性强,应用范围广泛。
以上课题都在个人兴趣驱使下开展,纯学术,无公害。
欢迎感兴趣的研究生、本科生加入。
【小组成员】
研究生:付婵君(2013-2016. 内蒙古电力(集团)有限责任公司)
研究生:马亦婧(2015-2018.), 张兵 (2015-2018.)
研究生:刘建聪(2016-),朱海燕(2016-)
研究生:
本科生:吴雨泽、黄章林、刘晓波、郜明、翁艺丰 (2013-2017.)
本科生:彭建伟
【讲授课程】
本科生课程:自动化专业英语、自动检测技术、计算机集成制造等
研究生课程:线性系统理论、鲁棒控制、专业文献阅读等
【代表著作】
[1] Zhuoyun Nie, Qingguo Wang, Ruijuan Liu, and Yonghong Lan. Identification and PID control for a class of delay fractional-order systems. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4):463-476.
[2] Zhuoyun Nie, Ruijuan Liu, Qing-Guo Wang. Fujiang Jin. Design and Analysis of Optimal GPM-PID Control and Simulations for Liquid Level control. International Journal of Automation and Computing, 2016, 13(6):1-10.
[3] 聂卓赟, 刘瑞娟. 复杂条件下倒立摆系统摆角控制设计与实验研究. 信息与控制, 2016, 45(4):506-512.
[4]. Zhuoyun Nie, Chanjun Fu, Ruijuan Liu, Dongsheng Guo, Yijing Ma. An asymmetric Prandtl-Ishlinskii hysteresis model for giant magnetostrictive actuator. Journal of Advanced Computational Intelligence and Intelligent Informatics. 2016, 20(10):1993-2000.
[5] Zhuo-Yun Nie, Qing-Guo Wang, Min Wu, Yong He. A Novel Computational Method for Loop Gain and Phase Margins of TITO Systems. Journal of the Franklin Institute. 2013, 350(3): 503-520
[6] Zhuo-Yun Nie, Qing-Guo Wang, Min Wu, Yong He. Tuning of multi-loop PI controllers based on gain and phase margin specifications. Journal of Process Control. 2011, 21 (9): 1287-1295
[7] Zhuo-Yun Nie, Qing-Guo Wang, Min Wu, Yong He. Lead/Lag Compensator Design for Unstable Delay Processes Based on New Gain and Phase Margin Specifications. Industrial and Engineering Chemistry Research. 2011, 50 (3): 762-768
[8] Zhuo-Yun Nie, Qing-Guo Wang, Min Wu, Yong He. Exact computation of loop gain margins of multivariable feedback systems. Journal of Process Control. 2010, 20 (6): 762-768
[9] Zhuo-Yun Nie, Qing-Guo Wang, Min Wu, Yong He. Combined gain and phase margins. ISA Transactions, 2009, 48 (4): 428-433
[10] Qing-Guo Wang, Zhuoyun Nie. 《PID Control in the Third Millennium》—Chapter 6: PID control for MIMO processes. Springer. 5-8.


